Humanoid Robots: Why They’re Still Not Ready for Real Work
-
 By
Arthur Kellan
By
Arthur Kellan
- Technology
- 5 min read
- Technology
- 5 min read
Have you seen even one video presentation of humanoid robots from Boston Dynamics or Tesla? If not, we assure you – they make you believe the rise of the machines is just around the corner. Their robots do somersaults, fold T-shirts, and walk steadily over uneven terrain.
However, in reality, this is just hype, which is still struggling with problems the robotics industry has been trying to overcome for decades (and still hasn’t).
The Engineering Challenge: Movement and Stability
For humans, walking is essentially a process of controlled falling, honed to the point of automatism. For robots, however, it means constantly solving differential equations in real time. The challenge is that they need to maintain balance and mobility dynamically.
Because humanoids have a high center of gravity and a small footprint, unlike wheeled platforms or quadrupedal robots, two-legged robots must expend a lot of computational power and energy simply to avoid falling. Specifically, any movement they perform requires instantaneous adjustments to hundreds of parameters, including joint torque, limb inertia, surface resistance, and much more. And yes, despite all the tricks we see at presentations by robotics industry leaders, any random object on the floor (even a simple cable underfoot, which is typical of real-world environments) still becomes an insurmountable obstacle for a robot.
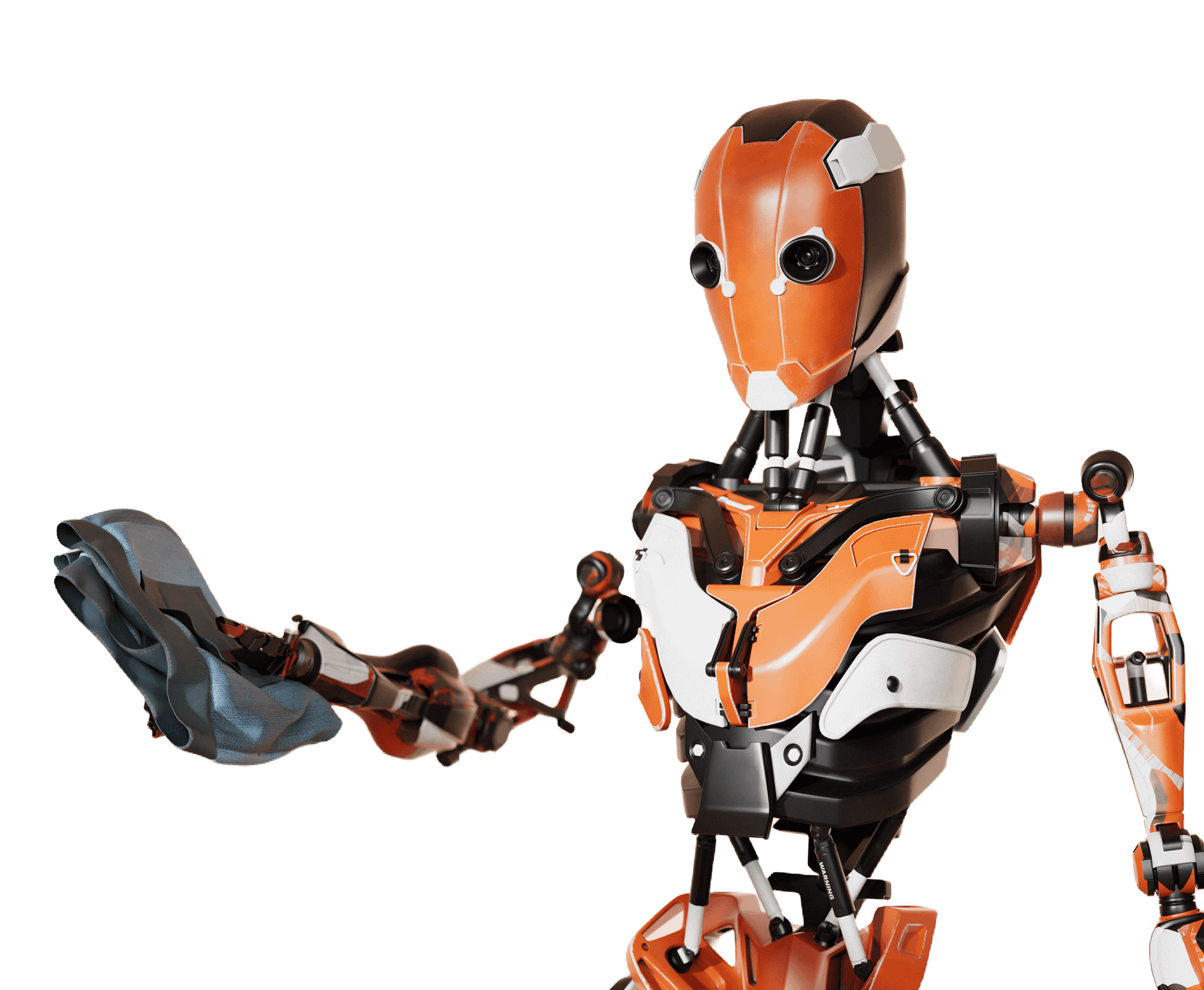
Manipulation: The Hard Problem Nobody Solved
We may be endlessly amazed by the intricate movements of robotic legs, but that doesn’t mean they’re perfect in every way – the real tragedy unfolds at the hands. The fact is, the human hand is a perfect instrument with 27 degrees of freedom and incredibly precise sensory feedback.
And yes, from this perspective, even the most advanced humanoid robots remain tactilely blind. While their capabilities are sufficient to lift a box, for example, they struggle to handle fragile or deformable objects like fabric or the notorious cables. This is where proprioception (the ability to sense compressive force and texture) comes in handy – otherwise, the robot will simply crush the object or drop it.
Currently, it’s extremely difficult to implement this feature digitally, so when we see a demo of clothes folding, it’s either teleoperation (when a person in a VR headset controls the robot’s arms [1]) or the result of thousands of iterations in the same laboratory environment (meaning the robot won’t be able to handle other tasks and other objects with the same precision).
Tesla Optimus vs Atlas: Different Approaches
Let’s take a quick look at two of the most hyped projects in the robotics industry – they represent opposing approaches to solving the same problem.
In particular, Atlas Boston Dynamics can be compared to this Formula 1 car. It’s exciting because it can reach the limits of physics, but it’s still not a production-line model. The Optimus robot, on the other hand, is a kind of robotic smartphone.
This robot Tesla solution is average in its performance, but its production is highly scalable thanks to AI control and the use of low-cost components.
However, even Elon Musk himself admits that the main battle now isn’t over motors, but over whether a particular robot model can adapt to the real world’s chaos.

|
Feature
|
Boston Dynamics Atlas (Electric)
|
Tesla Optimus (Gen 2)
|
|---|---|---|
|
Concept
|
Athletic research platform
|
Mass-production solution
|
|
Drives
|
Custom electric motors with the top efficiency
|
Standardized actuators with low cost to assemble
|
|
Intelligence
|
Programmable logic and parkour scripts
|
Neural network learning
|
|
Pros
|
Perfect biomechanics, speed, and balance
|
Integration with Tesla's AI ecosystem and autopilot
|
|
Cons
|
Excessive complexity and too high price
|
Currently inferior in manipulation precision
|

Why Factories Still Prefer Simpler Robots
From an industrial engineer’s perspective, a humanoid robot is a prime example of redundancy. Specifically, if you need to move pallets, just buy an AGV, while to weld a truck body, the only thing you have to do is install a stationary manipulator arm like Kuka or Fanuc.

Why are these robotics engineering alternatives better? They’re narrow-focused and don’t have to expend 30-50% of their energy just to maintain an upright position, unlike a bipedal robot (for example, a wheeled robot spends 0%). It’s also worth noting that a two-meter-tall, 80-kg machine can lose its balance, which would violate any occupational safety regulations.
Finally, the cost of owning a humanoid, including maintaining complex joints, is currently several times higher than the salary of ten workers, making their purchase impractical in most industrial sectors.
Where Humanoid Robots Might Actually Work
The only compelling argument in favor of humanoid robots is that they adapt better than any other robots to infrastructure – stairs, door handles, narrow aisles, table heights, etc. This means, for example, that in situations where a warehouse can’t be converted into a conveyor belt, but where trucks of various configurations need to be unloaded, such robots will be extremely effective (there’s even a real-world project called Digit from Agility Robotics [2]).
They can also find application in hazardous environments, such as emergency response at nuclear power plants or chemical plants, where remote control is possible. Finally, they can be considered for use in the social sector – particularly in caring for the elderly or people with disabilities.
Conclusion
The gap between impressive demos and actual implementation remains vast – even flagship humanoid robot models still have automation limits, requiring remote human control for some tasks, and are generally too expensive to purchase and maintain. This raises a reasonable question: are robots really that close to replacing manual labor?..
Sources:
[1] – Elon Musk’s Latest Robot Video Accidentally Gives Away The Magic Trick
[2] – Humanoid Solutions

Arthur Kellan
Discover with Vireon Press


Edge Computing: When the Cloud Is Too Far Away
